旋鉚機的驅動方式有哪些?旋鉚機的種類有哪些?
2024-05-23 | 閱讀:1
分享至
今天我們來討論下旋鉚機的驅動方式,即旋鉚機運動動力的來源有哪些首先,再現有的旋鉚機當中,無論是徑向旋鉚機還是擺碾旋鉚機,其運動主要有兩部分,第一,鉚頭的回轉運動;第二,鉚頭的往復直線運動;其中鉚頭的回轉運動主要有電機驅動,所以我們今天主要來探討鉚頭的往復直線運動,主要有以下幾種方式驅動:
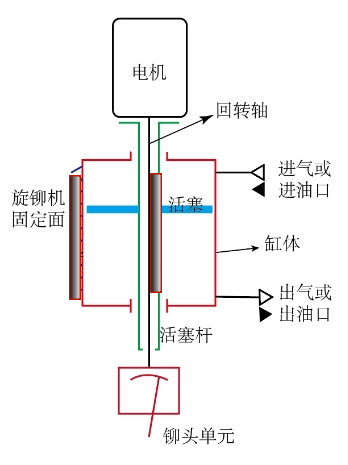
第一種,壓縮空氣驅動,即氣動旋鉚機,氣動旋鉚機受氣源壓力的影響(壓力一般在0.2~1MPa之前),輸出力是有限制的,以我司為例,在兼顧外形的情況下,采用特殊活塞設計,現有的氣壓徑向旋鉚機的鉚接力最大在1.7噸左右(氣壓在0.6MPa時),可鉚接12mm的鋼制鉚釘,對于氣動旋鉚機來說,這已經是重載氣動旋鉚機的了,當然,我司也會為客戶定制更大輸出力的氣動旋鉚機,最大的鉚接力約在3.3噸左右,可鉚接16mm的鋼制鉚釘,此時缸的外徑約在230左右,體積略大。
第二種,液壓驅動,也就是我們常說的液壓旋鉚機,液壓旋鉚機與氣動旋鉚機的最大不同之處在于工作介質是液壓油;常用液壓油主要有32號和46號,這里主要是粘度不同,中高壓最好用粘度大的,其中,油壓壓力有低壓、中壓、高壓等,選擇性非常的廣,這樣,鉚接力相對而言就會寬一些,我司現有國產液壓油壓旋鉚機當中,鉚接力最大為6噸,可鉚接20mm左右的鋼制鉚釘,當然,我們也會為客戶定制10噸以上的重型液壓徑向旋鉚機。
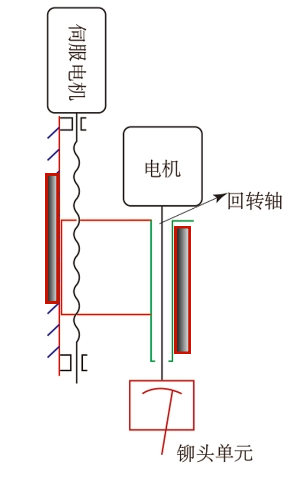
第三種驅動方式那就是電了,也就是同服旋鉚機,往復運動由伺服電機驅動,旋轉運動可為伺服電機,也可為其他普通電機,如簡圖所示,整個回轉運動模塊安裝在滾珠絲桿上,然后由伺服電機帶動滾珠絲桿,實現往復直線運動,這種控制的精度取決于滾珠絲桿的精度,或者位移光柵尺的精度,我司現有伺服旋鉚機當中,精度在土0.02的,無需配置位移傳感器,直接由伺服電機驅動即可,精度在土0.01的,一般會增加一組位移傳感器,或者位移光柵尺作為輔助監測,保證鉚接質量。伺服旋鉚機的顯著特點是可以控制任意鉚接行程及鉚接速度,這樣,如果再搭配一些傳感器,檢測鉚釘、工件等高度,然后反饋給伺服電機,可大大提高鉚接的一致性,減少鉚釘高度對鉚接的影響,這對一些回轉體尤為重要。